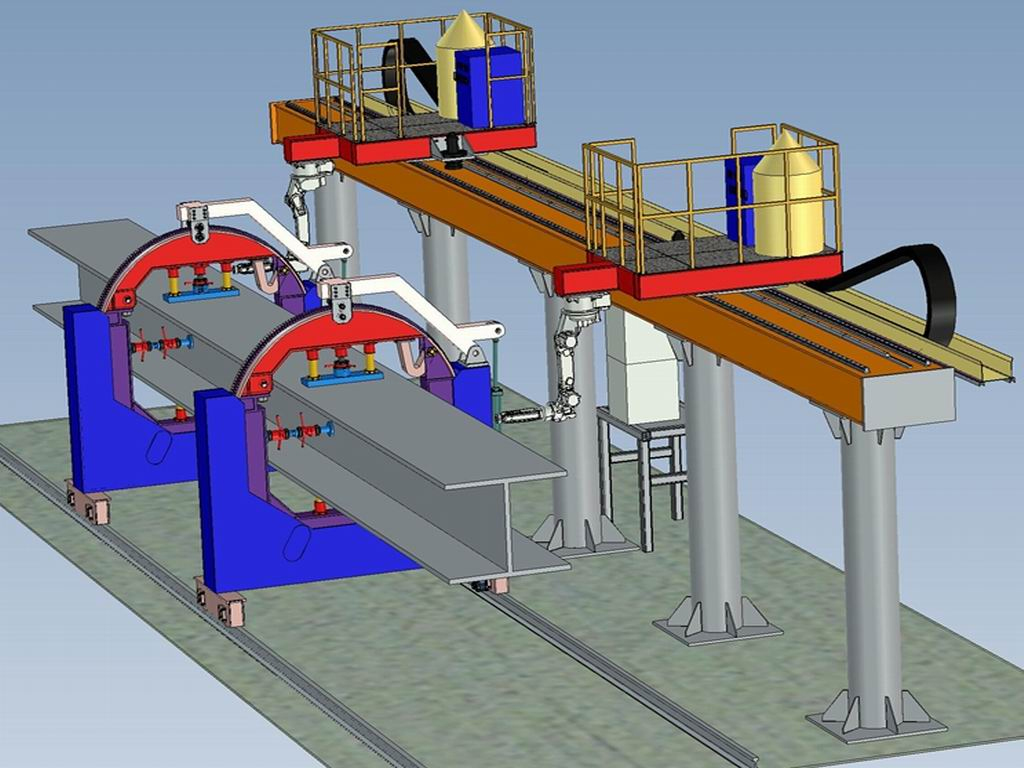
工程機械行業焊接工作站主要通過各種形式的變位器,配合機器人進行連動,完成工程機械斗桿、動臂、車架等工件的全位置焊接。機器人搭載在懸臂焊接架或移動平臺上,通過機器人的外部軸控制,滿足機器人的大范圍移動,工件在各種變位器的作用下,將焊縫變位到到可焊位置,同時變位器和機器人相互協調連動,完成工件全位置的自動焊接。該機主要由懸臂架、L臂、移動平臺、焊接機器人、數字逆變焊接電源、接觸式尋位器、電弧跟蹤器、自動清槍器,L型變位器、頭尾變位器、固定式翻轉變位器、集成數字控制系統等組成。
<small id='63old'></small><noframes id='63old'>
<tbody id='63old'></tbody>
<bdo id='63old'></bdo><ul id='63old'></ul>